🔷 실습 6 (2)
- 축구
- 이산값
🔷 트레이닝 환경 구축

- 태그 추가
- 각 오브젝트에 태그 부여

- 컴포넌트 추가 : Ray Perception Sensor 3D

- Sensor Name : RayFront : 센서를 여러개 사용할 경우 이름이 중복되면 안됨
- Detectable Tags : 인식할 오브젝트의 태그 추가
- Ray per Director : 4 : 레이의 개수 : 4 * 2 + 1 = 9개
- Max Ray Degrees : 80 : 레이의 간격
- Ray Length : 40 : Agent가 경기장 끝에 있을때도 반대편까지 레이가 닿도록, 사각지대가 없도록 조절
- 컴포넌트 copy
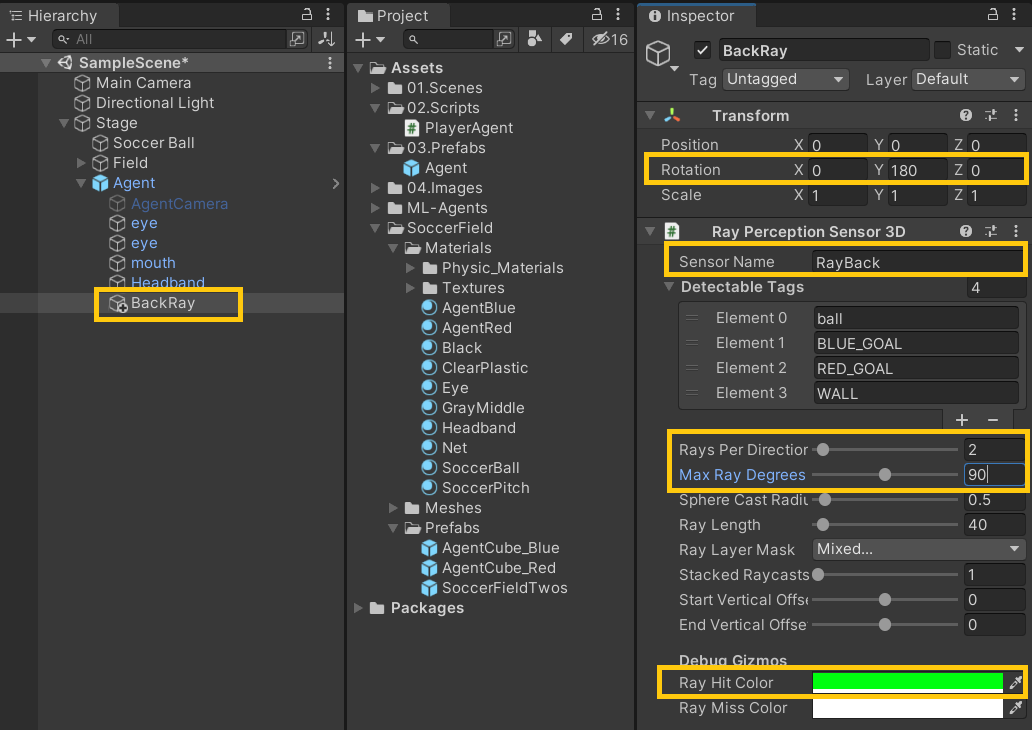
- Agent 아래에 빈 게임오브젝트 추가 : BackRay
- 컴포넌트 paste : Ray Perception Sensor 3D
- Rotation : 0, 180, 0
- Sensor Name : RayBack
- Ray per Director : 2
- Max Ray Degrees : 90
- Ray Hit Color : Green
- Apply All

- Agent > Agent_Blue 이름변경
- 복사 > Agent_Red 이름변경

- Team : Red

- TMP_Pro 임포트

- 캔버스 추가
- Render Mode : World Space
- Rect Transform : Reset
- Pos Y : 0.2
- Width : 30
- Height : 15
- Rotation : 90, 0, 0

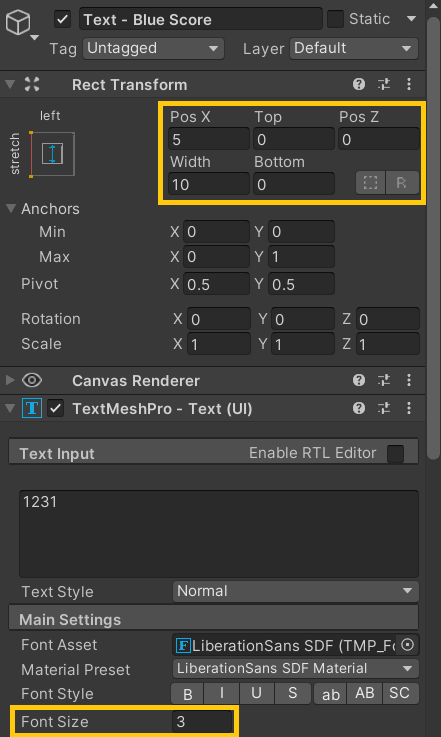

- 캔버스 아래에 TMP_Text 오브젝트 추가 > Text - Blue Score로 이름 변경
- 정렬 : Alt + 좌측하단에 있는 것
- Pos X : 5
- Width : 10
- Font Size : 3
- Alignment : 좌우 가운데, 상하 가운데

- Blue Score 복사 > Text - Red Score로 이름 변경
- 정렬 : Alt + 우측하단
🔶 골대에 공이 닿으면 득점 처리

- 스크립트 생성 : BallCtrl.cs
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using TMPro;
using Unity.MLAgents;
public class BallCtrl : MonoBehaviour
{
public Agent[] players;
// 각 팀의 점수
private int blueScore, redScore;
public TMP_Text blueScoreText, redScoreText;
void Start()
{
}
}

- Soccer Ball에 BallCtrl 스크립트 추가
- players : Blue, Red 순서 맞춰서 연결
- TMP_Text도 연결
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using TMPro;
using Unity.MLAgents;
public class BallCtrl : MonoBehaviour
{
public Agent[] players;
private new Rigidbody rigidbody;
// 각 팀의 점수
private int blueScore, redScore;
public TMP_Text blueScoreText, redScoreText;
void Start()
{
rigidbody = GetComponent<Rigidbody>();
}
void InitBall()
{
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
// 축구공의 위치를 초기화
transform.localPosition = new Vector3(0.0f, 1.0f, 0.0f);
}
private void OnCollisionEnter(Collision other)
{
if (other.collider.CompareTag("BLUE_GOAL"))
{
// 레드팀 스코어 +1점
redScoreText.text = (++redScore).ToString();
// 레드팀 리워드 +1.0f
// 블루팀 리워드 -1.0f
InitBall();
}
if (other.collider.CompareTag("RED_GOAL"))
{
// 블루팀 스코어 +1점
blueScoreText.text = (++blueScore).ToString();
// 레드팀 리워드 -1.0f
// 블루팀 리워드 +1.0f
InitBall();
}
}
}- 골대에 공을 넣으면 스코어 득점
🔶 리워드 부여 및 학습종료 세팅
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using TMPro;
using Unity.MLAgents;
public class BallCtrl : MonoBehaviour
{
public Agent[] players;
private new Rigidbody rigidbody;
// 각 팀의 점수
private int blueScore, redScore;
public TMP_Text blueScoreText, redScoreText;
void Start()
{
rigidbody = GetComponent<Rigidbody>();
}
void InitBall()
{
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
// 축구공의 위치를 초기화
transform.localPosition = new Vector3(0.0f, 1.0f, 0.0f);
}
private void OnCollisionEnter(Collision other)
{
if (other.collider.CompareTag("BLUE_GOAL"))
{
// 레드팀 스코어 +1점
redScoreText.text = (++redScore).ToString();
// 레드팀 리워드 +1.0f
players[1].AddReward(+1.0f);
// 블루팀 리워드 -1.0f
players[0].AddReward(-1.0f);
// 볼 초기화
InitBall();
players[0].EndEpisode(); // 블루팀 학습종료
players[1].EndEpisode(); // 레드팀 학습종료
}
if (other.collider.CompareTag("RED_GOAL"))
{
// 블루팀 스코어 +1점
blueScoreText.text = (++blueScore).ToString();
// 레드팀 리워드 -1.0f
players[1].AddReward(-1.0f);
// 블루팀 리워드 +1.0f
players[0].AddReward(+1.0f);
// 볼 초기화
InitBall();
players[0].EndEpisode(); // 블루팀 학습종료
players[1].EndEpisode(); // 레드팀 학습종료
}
}
}
🔷 트레이닝

- poca 폴더 안에 있는 SoccerTwos.yaml 복사

- behavior 이름 동일하게 변경
- Stage 프리팹화

- 복사

- 트레이닝 시작

- 유니티 play
'🎮unity > ML-Agents' 카테고리의 다른 글
| 06. ML-Agents - Soccer (1) (1) | 2021.08.02 |
|---|---|
| 05. ML-Agents - Imitation Learning (0) | 2021.08.02 |
| 04. ML-Agents - Camera Sensor (0) | 2021.08.01 |
| 03. ML-Agents - Ray Perception Sensor 3D (0) | 2021.07.30 |
| 02. ML-Agents - position,rigidbody 관측 (0) | 2021.07.30 |



