🔷 실습 6 (1)
- 축구
- 이산값
🔶 프로젝트 세팅
- 프로젝트 생성 : MLSoccer
- 패키지 다운로드 및 임포트 : Soccer Field
- 폴더 정리
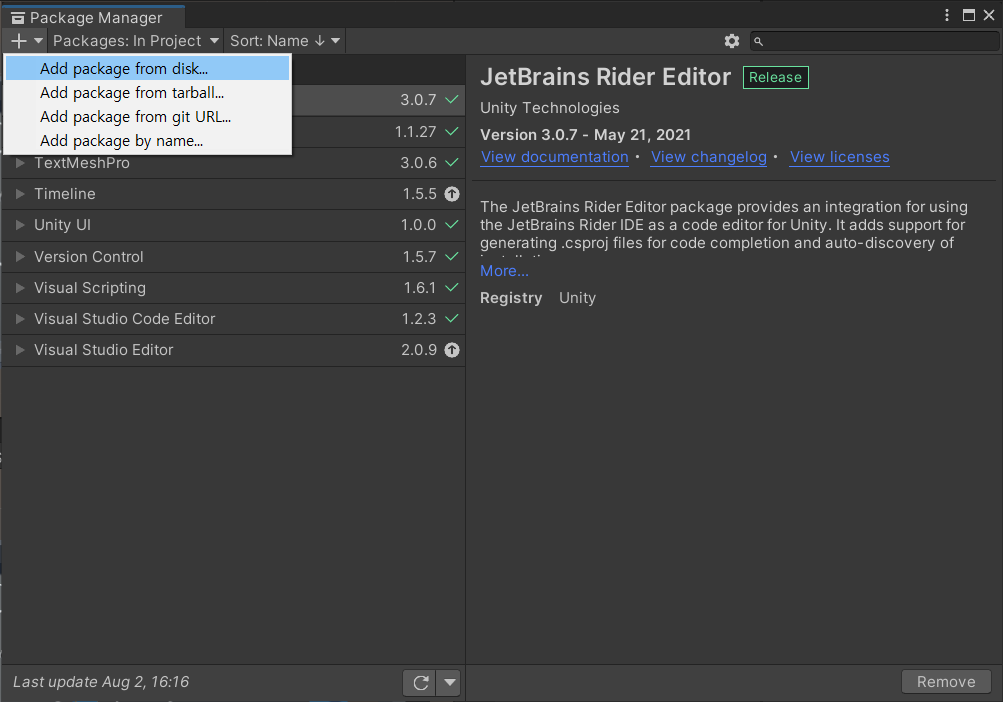
- Add package from disk
- mlagents, mlagents extentions 패키지 설치
- 경로
- ml-agents\com.unity.ml-agents\package.json
- ml-agents\com.unity.ml-agents.extensions\package.json

- 패키지 2개가 설치된 것을 확인
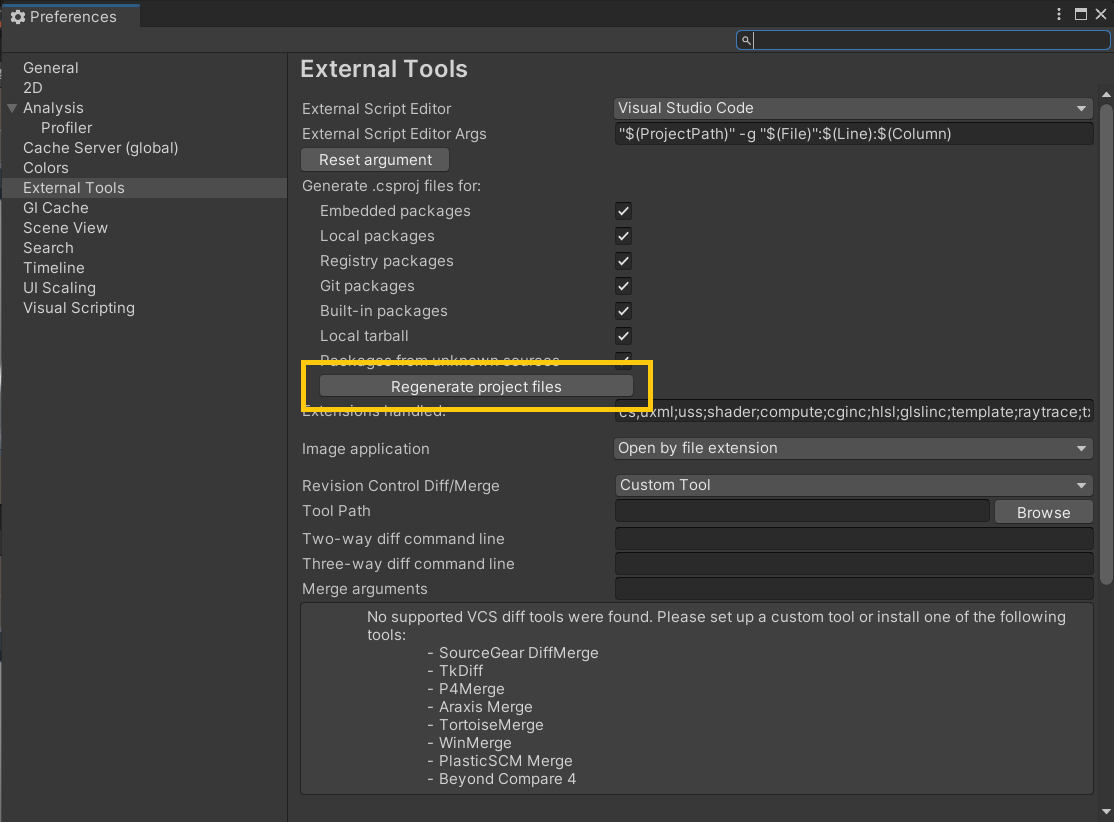
- Regenerate project files

- Ctrl + Shift + P
- OmniSharp : Restart OmniSharp
🔷 트레이닝 환경 구축
🔶 씬 세팅
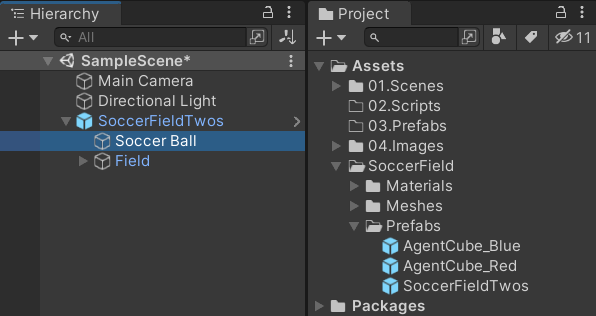

- SoccerFieldTwos : 하이어라키창에 끌어다놓기
- Stage로 이름 변경
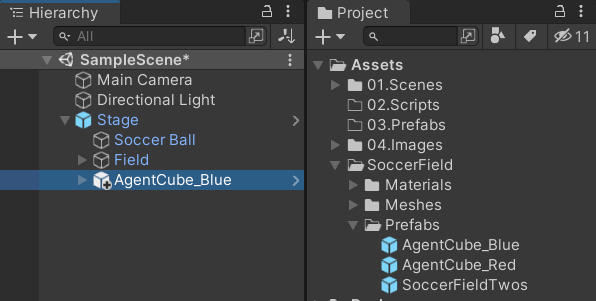
- Stage 아래에 AgentCube_Blue 프리팹 추가
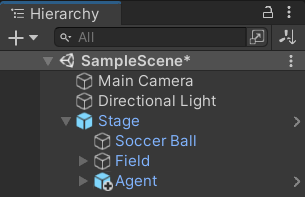
- AgentCube_Blue -> Agent로 이름 변경
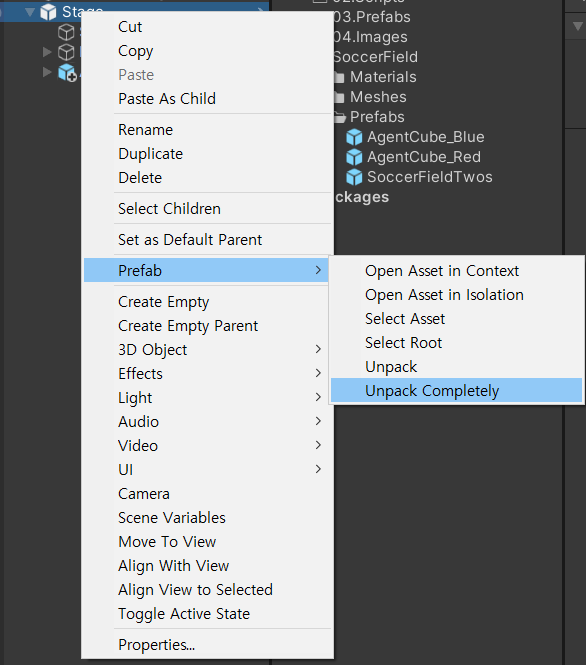
- Stage : Unpack
- Agent 프리팹화
🔶 PlayerAgent.cs : agent team, 색상 설정
- PlayerAgent.cs 생성
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// Behavior Parameters
private BehaviorParameters bps;
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
// 팀 아이디 설정
}
}
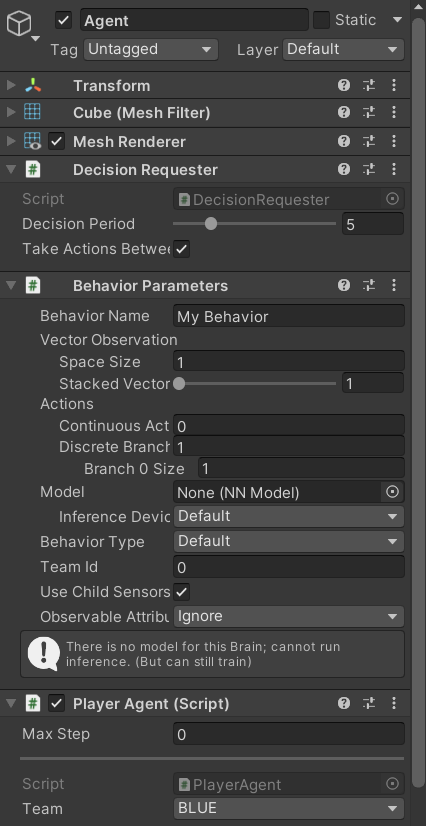
- PlayerAgent 스크립트 추가
- rotation : 0, 0, 0
- behavior Name : Soccer
- Space Size : 0
- Team Id : Team Id가 같은 플레이어끼리 경험을 공유하고 같은 Brain을 사용함
- 0 : Blue
- 1 : Red
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
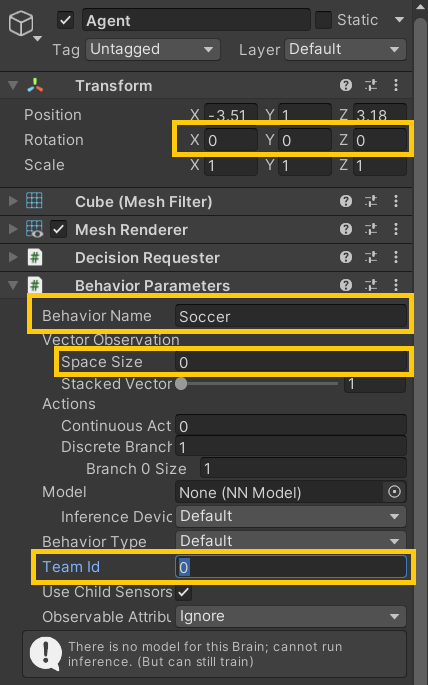
}- 팀아이디 설정, 색상 변경
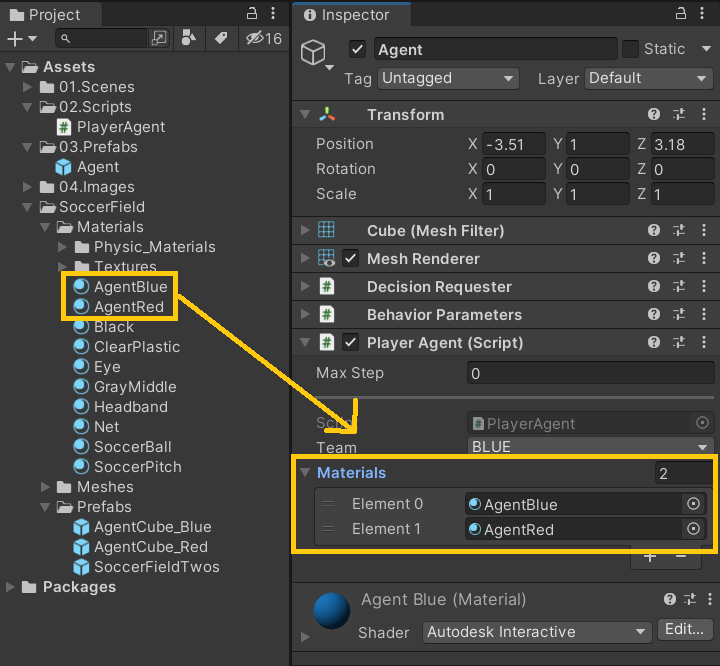
- 머티리얼 Blue, Red순으로 연결
🔶 초기 위치
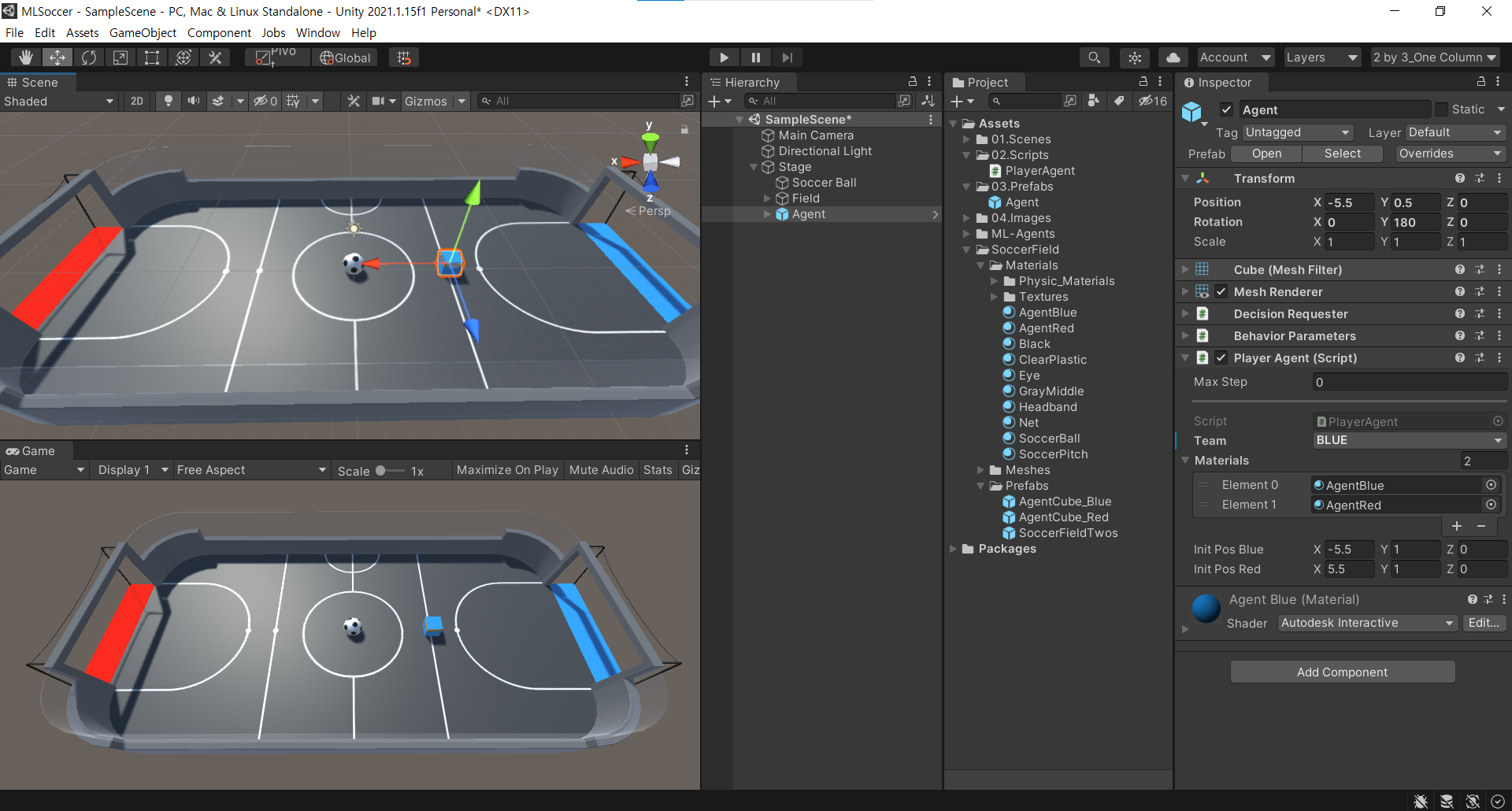
- 점이 찍혀있는 위치로 초기화되도록 설정할 예정
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
// 플레이어의 초기 위치, 각도
private Vector3 initPosBlue = new Vector3(-5.5f, 0.5f, 0.0f);
private Vector3 initPosRed = new Vector3(5.5f, 0.5f, 0.0f);
private Quaternion initRotBlue = Quaternion.Euler(Vector3.up * 90.0f);
private Quaternion initRotRed = Quaternion.Euler(Vector3.up * -90.0f);
void InitPlayer()
{
transform.localPosition = (team == TEAM.BLUE) ? initPosBlue : initPosRed;
transform.localRotation = (team == TEAM.BLUE) ? initRotBlue : initRotRed;
}
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
public override void OnEpisodeBegin()
{
// 플레이어 위치, 각도 초기화
InitPlayer();
}
}- 초기 위치, 각도 세팅
🔶 rigidbody 물리력 초기화
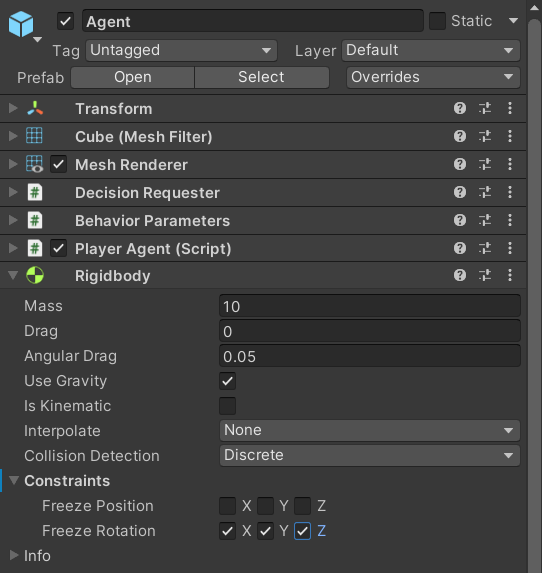
- 컴포넌트 추가 : rigidbody
- mass : 10 : 공이 3이니까 더 무겁게 설정
- Freeze Rotation
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
private new Rigidbody rigidbody;
// 플레이어의 초기 위치, 각도
private Vector3 initPosBlue = new Vector3(-5.5f, 0.5f, 0.0f);
private Vector3 initPosRed = new Vector3(5.5f, 0.5f, 0.0f);
private Quaternion initRotBlue = Quaternion.Euler(Vector3.up * 90.0f);
private Quaternion initRotRed = Quaternion.Euler(Vector3.up * -90.0f);
void InitPlayer()
{
transform.localPosition = (team == TEAM.BLUE) ? initPosBlue : initPosRed;
transform.localRotation = (team == TEAM.BLUE) ? initRotBlue : initRotRed;
}
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
rigidbody = GetComponent<Rigidbody>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
public override void OnEpisodeBegin()
{
// 플레이어 위치, 각도 초기화
InitPlayer();
// 물리력 초기화
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
}
}- 물리력 초기화
🔶 이동 및 회전 로직 : 이산값
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
private new Rigidbody rigidbody;
// 플레이어의 초기 위치, 각도
private Vector3 initPosBlue = new Vector3(-5.5f, 0.5f, 0.0f);
private Vector3 initPosRed = new Vector3(5.5f, 0.5f, 0.0f);
private Quaternion initRotBlue = Quaternion.Euler(Vector3.up * 90.0f);
private Quaternion initRotRed = Quaternion.Euler(Vector3.up * -90.0f);
void InitPlayer()
{
transform.localPosition = (team == TEAM.BLUE) ? initPosBlue : initPosRed;
transform.localRotation = (team == TEAM.BLUE) ? initRotBlue : initRotRed;
}
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
rigidbody = GetComponent<Rigidbody>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
public override void OnEpisodeBegin()
{
// 플레이어 위치, 각도 초기화
InitPlayer();
// 물리력 초기화
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
}
public override void OnActionReceived(ActionBuffers actions)
{
var action = actions.DiscreteActions;
Debug.Log($"[0]={action[0]}, [1]={action[1]}, [2]={action[2]}");
}
public override void Heuristic(in ActionBuffers actionsOut)
{
var actions = actionsOut.DiscreteActions;
// 파라미터 값을 초기화
actions.Clear();
// 정지, 전진, 후진 (0, 1, 2)
if (Input.GetKey(KeyCode.W)) actions[0] = 1;
if (Input.GetKey(KeyCode.S)) actions[0] = 2;
// 정지, 좌, 우 이동 (0, 1, 2)
if (Input.GetKey(KeyCode.Q)) actions[1] = 1;
if (Input.GetKey(KeyCode.E)) actions[1] = 2;
// 정지, 좌, 우 회전 (0, 1, 2)
if (Input.GetKey(KeyCode.A)) actions[2] = 1;
if (Input.GetKey(KeyCode.D)) actions[2] = 2;
}
}- 이동 및 회전 입력값 세팅

- Discrete Branches : 3
- Branch 0 : 3
- Branch 1 : 3
- Branch 2 : 3
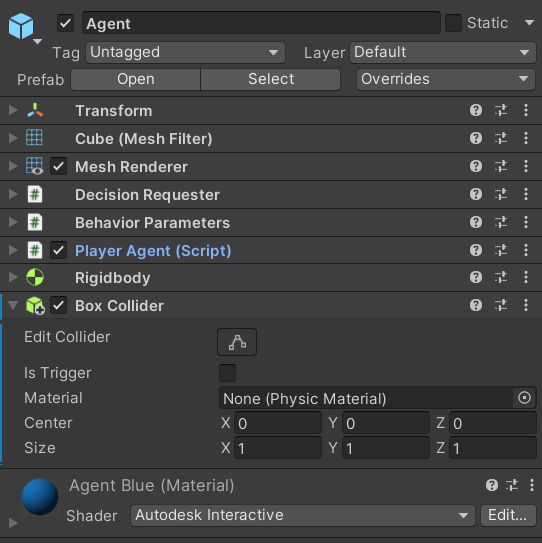
- box collider 추가
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
private new Rigidbody rigidbody;
// 플레이어의 초기 위치, 각도
private Vector3 initPosBlue = new Vector3(-5.5f, 0.5f, 0.0f);
private Vector3 initPosRed = new Vector3(5.5f, 0.5f, 0.0f);
private Quaternion initRotBlue = Quaternion.Euler(Vector3.up * 90.0f);
private Quaternion initRotRed = Quaternion.Euler(Vector3.up * -90.0f);
void InitPlayer()
{
transform.localPosition = (team == TEAM.BLUE) ? initPosBlue : initPosRed;
transform.localRotation = (team == TEAM.BLUE) ? initRotBlue : initRotRed;
}
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
rigidbody = GetComponent<Rigidbody>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
public override void OnEpisodeBegin()
{
// 플레이어 위치, 각도 초기화
InitPlayer();
// 물리력 초기화
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
}
public override void OnActionReceived(ActionBuffers actions)
{
var action = actions.DiscreteActions;
// Debug.Log($"[0]={action[0]}, [1]={action[1]}, [2]={action[2]}");
// 이동 벡터
Vector3 dir = Vector3.zero;
// 회전 벡터
Vector3 rot = Vector3.zero;
int forward = action[0]; // noen, W, S : 0, 1, 2
int right = action[1]; // noen, Q, E : 0, 1, 2
int rotate = action[2]; // noen, A, D : 0, 1, 2
switch (forward)
{
case 1: dir = transform.forward; break;
case 2: dir = -transform.forward; break;
}
switch (right)
{
case 1: dir = -transform.right; break;
case 2: dir = transform.right; break;
}
switch (rotate)
{
case 1: rot = -transform.up; break;
case 2: rot = transform.up; break;
}
rigidbody.AddForce(dir * 1.0f, ForceMode.VelocityChange);
transform.Rotate(rot, Time.fixedDeltaTime * 100.0f);
}
public override void Heuristic(in ActionBuffers actionsOut)
{
var actions = actionsOut.DiscreteActions;
// 파라미터 값을 초기화
actions.Clear();
// 정지, 전진, 후진 (0, 1, 2)
if (Input.GetKey(KeyCode.W)) actions[0] = 1;
if (Input.GetKey(KeyCode.S)) actions[0] = 2;
// 정지, 좌, 우 이동 (0, 1, 2)
if (Input.GetKey(KeyCode.Q)) actions[1] = 1;
if (Input.GetKey(KeyCode.E)) actions[1] = 2;
// 정지, 좌, 우 회전 (0, 1, 2)
if (Input.GetKey(KeyCode.A)) actions[2] = 1;
if (Input.GetKey(KeyCode.D)) actions[2] = 2;
}
}- 이동 및 회전 처리
🔶 Kick 처리
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents;
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
using Unity.MLAgents.Policies; // Behavior Parameter 컴포넌트를 접긴하기 위한 네임스페이스
[RequireComponent(typeof(DecisionRequester))]
public class PlayerAgent : Agent
{
public enum TEAM
{
BLUE, RED
}
// 플레이어의 팀
public TEAM team = TEAM.BLUE;
// 플레이어의 색상
public Material[] materials;
// Behavior Parameters
private BehaviorParameters bps;
private new Rigidbody rigidbody;
// 플레이어의 초기 위치, 각도
private Vector3 initPosBlue = new Vector3(-5.5f, 0.5f, 0.0f);
private Vector3 initPosRed = new Vector3(5.5f, 0.5f, 0.0f);
private Quaternion initRotBlue = Quaternion.Euler(Vector3.up * 90.0f);
private Quaternion initRotRed = Quaternion.Euler(Vector3.up * -90.0f);
void InitPlayer()
{
transform.localPosition = (team == TEAM.BLUE) ? initPosBlue : initPosRed;
transform.localRotation = (team == TEAM.BLUE) ? initRotBlue : initRotRed;
}
public override void Initialize()
{
bps = GetComponent<BehaviorParameters>();
rigidbody = GetComponent<Rigidbody>();
// 팀 아이디 설정
bps.TeamId = (int)team;
// 플레이어의 색상변경
GetComponent<Renderer>().material = materials[(int)team];
// step 설정
MaxStep = 10000;
}
public override void OnEpisodeBegin()
{
// 플레이어 위치, 각도 초기화
InitPlayer();
// 물리력 초기화
rigidbody.velocity = rigidbody.angularVelocity = Vector3.zero;
}
public override void OnActionReceived(ActionBuffers actions)
{
var action = actions.DiscreteActions;
// Debug.Log($"[0]={action[0]}, [1]={action[1]}, [2]={action[2]}");
// 이동 벡터
Vector3 dir = Vector3.zero;
// 회전 벡터
Vector3 rot = Vector3.zero;
int forward = action[0]; // noen, W, S : 0, 1, 2
int right = action[1]; // noen, Q, E : 0, 1, 2
int rotate = action[2]; // noen, A, D : 0, 1, 2
switch (forward)
{
case 1: dir = transform.forward; break;
case 2: dir = -transform.forward; break;
}
switch (right)
{
case 1: dir = -transform.right; break;
case 2: dir = transform.right; break;
}
switch (rotate)
{
case 1: rot = -transform.up; break;
case 2: rot = transform.up; break;
}
rigidbody.AddForce(dir * 1.0f, ForceMode.VelocityChange);
transform.Rotate(rot, Time.fixedDeltaTime * 100.0f);
}
public override void Heuristic(in ActionBuffers actionsOut)
{
var actions = actionsOut.DiscreteActions;
// 파라미터 값을 초기화
actions.Clear();
// 정지, 전진, 후진 (0, 1, 2)
if (Input.GetKey(KeyCode.W)) actions[0] = 1;
if (Input.GetKey(KeyCode.S)) actions[0] = 2;
// 정지, 좌, 우 이동 (0, 1, 2)
if (Input.GetKey(KeyCode.Q)) actions[1] = 1;
if (Input.GetKey(KeyCode.E)) actions[1] = 2;
// 정지, 좌, 우 회전 (0, 1, 2)
if (Input.GetKey(KeyCode.A)) actions[2] = 1;
if (Input.GetKey(KeyCode.D)) actions[2] = 2;
}
private void OnCollisionEnter(Collision coll)
{
if (coll.collider.CompareTag("ball"))
{
// 볼 터치 : + 리워드
AddReward(0.2f);
// 킥 로직
Vector3 kickDir = coll.GetContact(0).point - transform.position;
coll.gameObject.GetComponent<Rigidbody>().AddForce(kickDir * 800.0f);
}
}
}- 플레이어와 공이 부딪히면
- 공을 찬 방향으로 AddForce
'🎮unity > ML-Agents' 카테고리의 다른 글
| 07. ML-Agents - Soccer (2) (0) | 2021.08.03 |
|---|---|
| 05. ML-Agents - Imitation Learning (0) | 2021.08.02 |
| 04. ML-Agents - Camera Sensor (0) | 2021.08.01 |
| 03. ML-Agents - Ray Perception Sensor 3D (0) | 2021.07.30 |
| 02. ML-Agents - position,rigidbody 관측 (0) | 2021.07.30 |



