🔷 실습2
- Agent가 Target을 향해 이동
- position, rigidbody 값 관측
- 연속 : actions.ContinuousActions
🔶 기본 세팅

- 폴더 정리
https://assetstore.unity.com/packages/3d/characters/free-mummy-monster-134212
Free Mummy Monster | 3D 캐릭터 | Unity Asset Store
Elevate your workflow with the Free Mummy Monster asset from amusedART. Find this & other 캐릭터 options on the Unity Asset Store.
assetstore.unity.com
- 패키지 다운로드 후 임포트
🔶 Agent 세팅


- Mummy_Mon프리팹을 Agent로 이름 변경

- 머티리얼 연결 > Apply

- 빈게임오브젝트(Stage)
- 큐브(Floor)
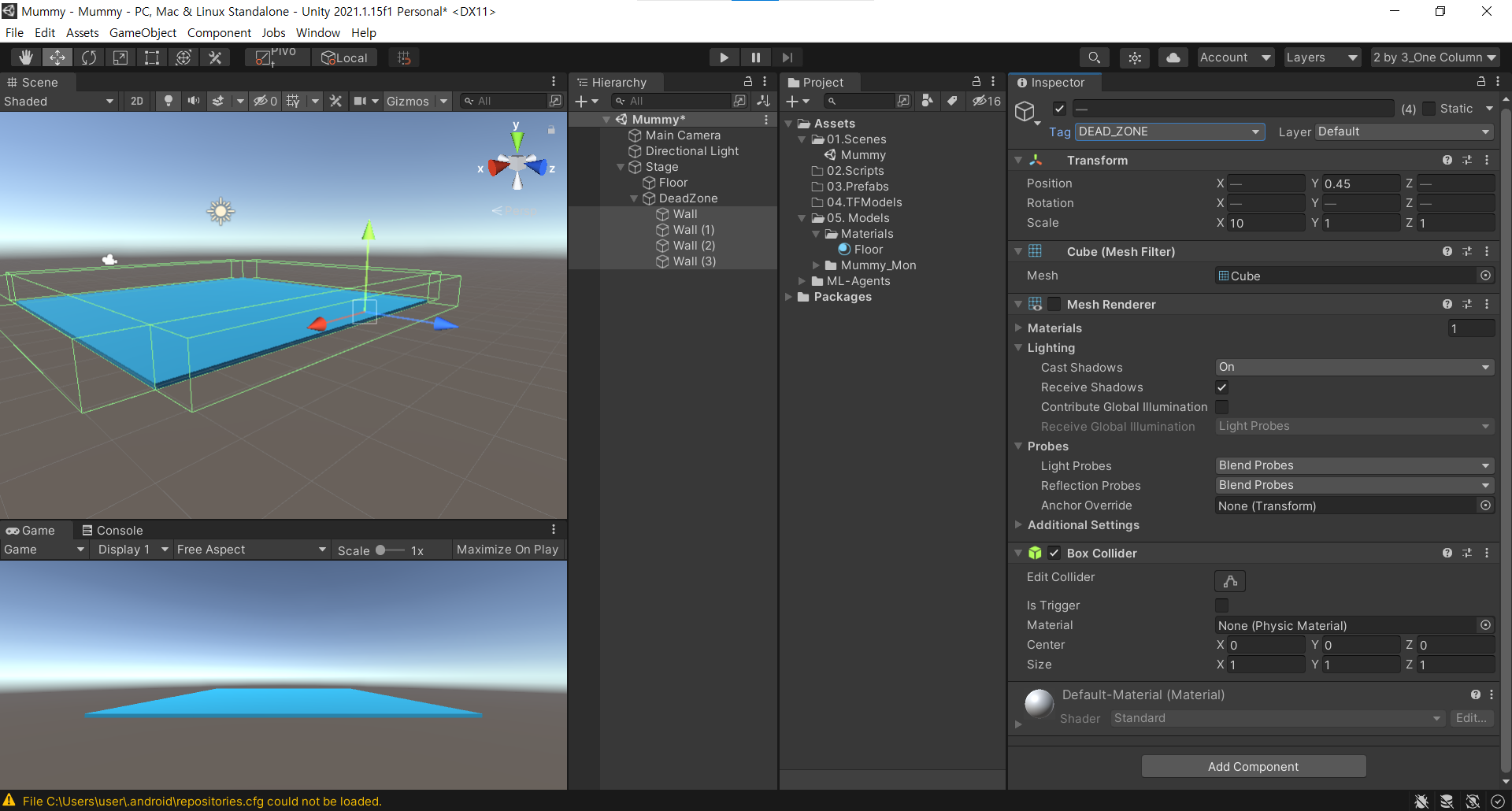
- 빈게임오브젝트(DeadZone)
- 큐브(Wall) 생성
- Mesh Renderer 비활성화
- Tag(DEAD_ZONE) 생성 > 적용

- 큐브(Target) 생성
- Tag(TARGET) 생성 > 적용

- Agent 추가

- Capsule Collider 추가 > 조정
- Rigidbody 추가 > Freeze Rotation
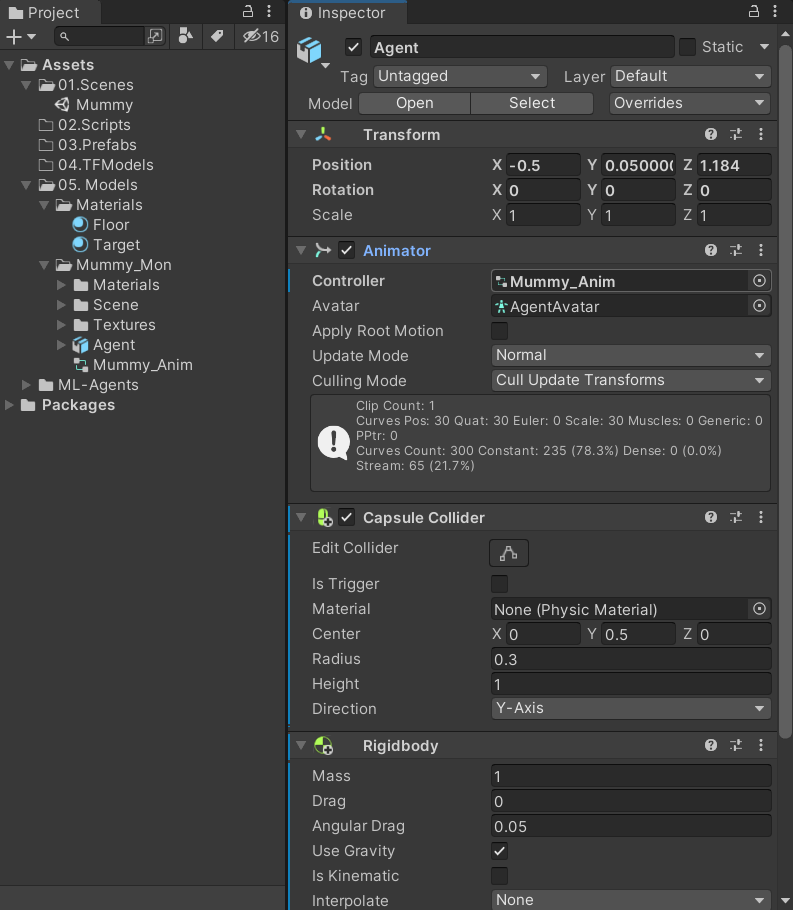
- Animator Controller 연결
🔶 Script 작성 : ML-Agent 기본 함수

- MummyAgent.cs 생성
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
}
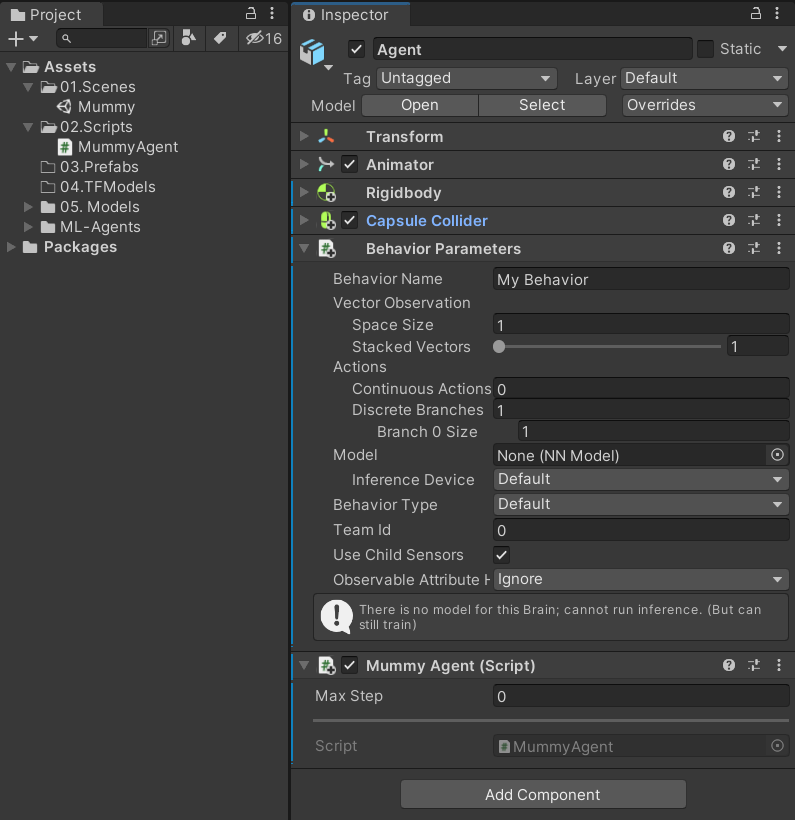
- Agent오브젝트에 MummyAgent.cs 연결
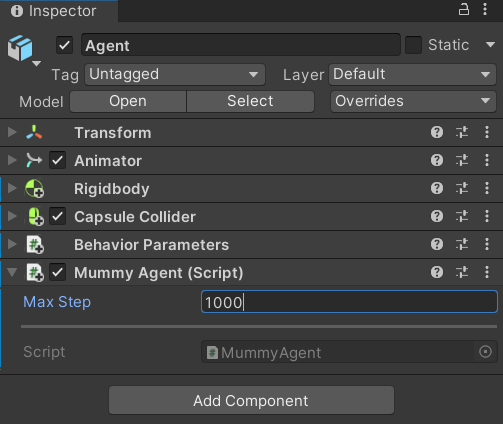
- Max Step : 해당 값만큼 움직였으나 보상이 없을 때 처음부터 다시 시작함
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
// 초기화 메소드
public override void Initialize()
{
}
// 에피소드(학습의 단위)가 시작될 때마다 호출되는 메소드
public override void OnEpisodeBegin()
{
}
// 주변 환경을 관측하는 콜백 메소드
public override void CollectObservations(VectorSensor sensor)
{
}
// 정책으로부터 전달받은 데이터를 기반으로 행동을 실행하는 메소드
public override void OnActionReceived(ActionBuffers actions)
{
}
// 개발자의 테스트 용도 / 모방학습
public override void Heuristic(in ActionBuffers actionsOut)
{
}
}- 기본 함수들
🔶 Script 작성 :
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
private new Rigidbody rigidbody;
private new Transform transform;
private Transform targetTr;
// 초기화 메소드
public override void Initialize()
{
rigidbody = GetComponent<Rigidbody>();
transform = GetComponent<Transform>();
targetTr = transform.parent.Find("Target");
}
// 에피소드(학습의 단위)가 시작될 때마다 호출되는 메소드
public override void OnEpisodeBegin()
{
// 물리력을 초기화
rigidbody.velocity = Vector3.zero;
rigidbody.angularVelocity = Vector3.zero;
// 에이전트의 위치를 불규칙하게 변경
transform.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.05f, Random.Range(-4.0f, 4.0f));
// 타겟의 위치를 불규칙하게 변경
targetTr.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.55f, Random.Range(-4.0f, 4.0f));
}
// 주변 환경을 관측하는 콜백 메소드
public override void CollectObservations(VectorSensor sensor)
{
// 총 8개의 데이터를 관측
sensor.AddObservation(targetTr.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(transform.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(rigidbody.velocity.x); // (x) 1개의 데이터
sensor.AddObservation(rigidbody.velocity.z); // (z) 1개의 데이터
}
// 정책으로부터 전달받은 데이터를 기반으로 행동을 실행하는 메소드
public override void OnActionReceived(ActionBuffers actions)
{
}
// 개발자의 테스트 용도 / 모방학습
public override void Heuristic(in ActionBuffers actionsOut)
{
}
}- 관측하는 데이터 개수를 정확하게 알아야함

- Behavior Name 명시
- Space Size : 관측하는 값 개수
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
private new Rigidbody rigidbody;
private new Transform transform;
private Transform targetTr;
// 초기화 메소드
public override void Initialize()
{
rigidbody = GetComponent<Rigidbody>();
transform = GetComponent<Transform>();
targetTr = transform.parent.Find("Target");
}
// 에피소드(학습의 단위)가 시작될 때마다 호출되는 메소드
public override void OnEpisodeBegin()
{
// 물리력을 초기화
rigidbody.velocity = Vector3.zero;
rigidbody.angularVelocity = Vector3.zero;
// 에이전트의 위치를 불규칙하게 변경
transform.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.05f, Random.Range(-4.0f, 4.0f));
// 타겟의 위치를 불규칙하게 변경
targetTr.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.55f, Random.Range(-4.0f, 4.0f));
}
// 주변 환경을 관측하는 콜백 메소드
public override void CollectObservations(VectorSensor sensor)
{
// 총 8개의 데이터를 관측
sensor.AddObservation(targetTr.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(transform.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(rigidbody.velocity.x); // (x) 1개의 데이터
sensor.AddObservation(rigidbody.velocity.z); // (z) 1개의 데이터
}
// 정책으로부터 전달받은 데이터를 기반으로 행동을 실행하는 메소드
public override void OnActionReceived(ActionBuffers actions)
{
// 연속 : actions.ContinuousActions
// 이산 : actions.DiscreteActions
var action = actions.ContinuousActions;
// [0] Up, Down
// [1] Left, Right
Vector3 dir = (Vector3.forward * action[0]) + (Vector3.right * action[1]);
rigidbody.AddForce(dir.normalized * 50.0f);
// 가만히 있을 때 마이너스 페널티 부여
SetReward(-0.001f);
}
// 개발자의 테스트 용도 / 모방학습
public override void Heuristic(in ActionBuffers actionsOut)
{
}
}

- 연속적인 값 2개 : Up,Down / Left, Right
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
private new Rigidbody rigidbody;
private new Transform transform;
private Transform targetTr;
// 초기화 메소드
public override void Initialize()
{
rigidbody = GetComponent<Rigidbody>();
transform = GetComponent<Transform>();
targetTr = transform.parent.Find("Target");
}
// 에피소드(학습의 단위)가 시작될 때마다 호출되는 메소드
public override void OnEpisodeBegin()
{
// 물리력을 초기화
rigidbody.velocity = Vector3.zero;
rigidbody.angularVelocity = Vector3.zero;
// 에이전트의 위치를 불규칙하게 변경
transform.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.05f, Random.Range(-4.0f, 4.0f));
// 타겟의 위치를 불규칙하게 변경
targetTr.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.55f, Random.Range(-4.0f, 4.0f));
}
// 주변 환경을 관측하는 콜백 메소드
public override void CollectObservations(VectorSensor sensor)
{
// 총 8개의 데이터를 관측
sensor.AddObservation(targetTr.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(transform.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(rigidbody.velocity.x); // (x) 1개의 데이터
sensor.AddObservation(rigidbody.velocity.z); // (z) 1개의 데이터
}
// 정책으로부터 전달받은 데이터를 기반으로 행동을 실행하는 메소드
public override void OnActionReceived(ActionBuffers actions)
{
// 연속 : actions.ContinuousActions
// 이산 : actions.DiscreteActions
var action = actions.ContinuousActions;
// [0] Up, Down
// [1] Left, Right
Vector3 dir = (Vector3.forward * action[0]) + (Vector3.right * action[1]);
rigidbody.AddForce(dir.normalized * 50.0f);
// 가만히 있을 때 마이너스 페널티 부여
SetReward(-0.001f);
}
// 개발자의 테스트 용도 / 모방학습
public override void Heuristic(in ActionBuffers actionsOut)
{
var action = actionsOut.ContinuousActions;
action[0] = Input.GetAxis("Vertical");
action[1] = Input.GetAxis("Horizontal");
}
}

- Decision Requester 컴포넌트 추가
// Decision Requester 컴포넌트 : 결정을 요청하는 요청자
// Decision Period : 5번에 한 번 결정을 요청함
using System.Collections;
using System.Collections.Generic;
using UnityEngine;
using Unity.MLAgents; // ML_Agents 네임스페이스
using Unity.MLAgents.Sensors;
using Unity.MLAgents.Actuators;
/*
에이전트의 역할
1. 주변환경을 관측(Observations)
2. 정책에 의해 행동(Action)
3. 보상(Reward)
*/
public class MummyAgent : Agent
{
private new Rigidbody rigidbody;
private new Transform transform;
private Transform targetTr;
public Material goodMAT;
public Material badMAT;
private Material originMAT;
private Renderer floorRd;
// 초기화 메소드
public override void Initialize()
{
rigidbody = GetComponent<Rigidbody>();
transform = GetComponent<Transform>();
targetTr = transform.parent.Find("Target");
floorRd = transform.parent.Find("Floor").GetComponent<Renderer>();
originMAT = floorRd.material;
}
// 에피소드(학습의 단위)가 시작될 때마다 호출되는 메소드
public override void OnEpisodeBegin()
{
// 물리력을 초기화
rigidbody.velocity = Vector3.zero;
rigidbody.angularVelocity = Vector3.zero;
// 에이전트의 위치를 불규칙하게 변경
transform.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.05f, Random.Range(-4.0f, 4.0f));
// 타겟의 위치를 불규칙하게 변경
targetTr.localPosition = new Vector3(Random.Range(-4.0f, 4.0f), 0.55f, Random.Range(-4.0f, 4.0f));
StartCoroutine(ReverMaterial());
}
IEnumerator ReverMaterial()
{
yield return new WaitForSeconds(0.2f);
floorRd.material = originMAT;
}
// 주변 환경을 관측하는 콜백 메소드
public override void CollectObservations(VectorSensor sensor)
{
// 총 8개의 데이터를 관측
sensor.AddObservation(targetTr.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(transform.localPosition); // (x,y,z) 3개의 데이터
sensor.AddObservation(rigidbody.velocity.x); // (x) 1개의 데이터
sensor.AddObservation(rigidbody.velocity.z); // (z) 1개의 데이터
}
// 정책으로부터 전달받은 데이터를 기반으로 행동을 실행하는 메소드
public override void OnActionReceived(ActionBuffers actions)
{
// 연속 : actions.ContinuousActions
// 이산 : actions.DiscreteActions
var action = actions.ContinuousActions;
// [0] Up, Down
// [1] Left, Right
Vector3 dir = (Vector3.forward * action[0]) + (Vector3.right * action[1]);
rigidbody.AddForce(dir.normalized * 50.0f);
// 가만히 있을 때 마이너스 페널티 부여
SetReward(-0.001f);
}
// 개발자의 테스트 용도 / 모방학습
public override void Heuristic(in ActionBuffers actionsOut)
{
var action = actionsOut.ContinuousActions;
action[0] = Input.GetAxis("Vertical");
action[1] = Input.GetAxis("Horizontal");
}
// 보상 처리 로직
void OnCollisionEnter(Collision coll)
{
if (coll.collider.CompareTag("DEAD_ZONE"))
{
floorRd.material = badMAT;
SetReward(-1.0f);
EndEpisode(); // 학습 종료
}
if (coll.collider.CompareTag("TARGET"))
{
floorRd.material = goodMAT;
SetReward(1.0f);
EndEpisode();
}
}
}- 리워드 추가
- 트레이닝이 잘 되고 있는지 시각화 : 충돌 시 floor 색상 변화

- Stage 프리팹화

- 스테이지 복사
🔶 트레이닝 시키기

- 3DBall.yaml파일을 복사 > 이름을 Mummy.yaml로

- Mummy.yaml 파일이 생성됐음

- Mummy.yaml파일 open
behaviors:
Mummy: #Unity Behavior Parameters 컴포넌트의 Behavior 이름과 동일해야함
trainer_type: ppo
hyperparameters:
batch_size: 64
buffer_size: 12000
learning_rate: 0.0003
beta: 0.001
epsilon: 0.2
lambd: 0.99
num_epoch: 3
learning_rate_schedule: linear
network_settings:
normalize: true
hidden_units: 128
num_layers: 2
vis_encode_type: simple
reward_signals:
extrinsic:
gamma: 0.99
strength: 1.0
keep_checkpoints: 5
max_steps: 300000 #300000번 실행 후 학습 종료
time_horizon: 1000
summary_freq: 10000 #10000번에 한번씩 summary- Mummy.yaml
- behavior 이름 주의하기

- Mummy.yaml 파일이 있는 ppo폴더 안에서 위의 코드를 실행

- 유니티에서도 실행
- 30000번 돌면 학습 종료됨
🔶 학습시킨 모델 적용시키기

- 학습한 모델(.onnx)을 프로젝트 창에 끌어다 놓기

- Agent의 model 파라미터에 학습한 모델(.onnx) 끌어다놓기
- apply to prefab

- play해 보면 잘 학습된 결과를 볼 수 있음
'🎮unity > ML-Agents' 카테고리의 다른 글
| 06. ML-Agents - Soccer (1) (1) | 2021.08.02 |
|---|---|
| 05. ML-Agents - Imitation Learning (0) | 2021.08.02 |
| 04. ML-Agents - Camera Sensor (0) | 2021.08.01 |
| 03. ML-Agents - Ray Perception Sensor 3D (0) | 2021.07.30 |
| 01. ML-Agents - 설치 및 간단한 실습 (1) | 2021.07.30 |



